- Received September 28, 2021
- Accepted October 09, 2021
- Publication October 22, 2021
- Visibility 93 Views
- Downloads 5 Downloads
- DOI 10.18231/j.ijodr.2021.033
-
CrossMark

- Citation
A comprehensive review on loops in orthodontics
- Author Details:
-
 Shetty Suhani Sudhakar *
Shetty Suhani Sudhakar *
-
Kamath Apoorva Shrinivasa
-
Praveena Shetty
-
Glodwin Antony
-
Sachin Shaji M
Introduction
Extraction therapies are frequently necessary in patients with protrusion or crowding. Once extraction is decided, antero-posterior position of incisor must be established and determination of the force system is to be done. Differential space closure is divided into Group A, Group B and Group C mechanics. Group A and C mechanics is more challenging than group B mechanics.[1]
Two basic types of space closing mechanics are friction/sliding and frictionless/loop mechanics. In frictionless mechanics, there is no guide wireand specially designed springs are used. The spring provides required M/F ratio in three dimensions and as no force is lost due to friction they are more predictable and versatile.[1]
Loop mechanics has the same 3 phases during space closure as sliding, namely tipping followed by translation and then root movement. The difference in a properly designed appliance is greater activation range and a more constant force, moment and M/F ratio leading to a constant centre of rotation.[1] In this review article we have explained about the various loops used widely in orthodontics including ideal dimension, activation and studies conducted using the loops.
Materials and Methods
An electronic literature search was conducted via google scholar, PubMed, and dental associations’ of different countries’ website using the key word “Loops” and “Frictionless mechanics.
Components of a loop
Loops consists of horizontal force system, vertical force system, alpha bend, beta bend and helical component. Each loop is constructed with one or more of the above components. Specific component of each loop has been mentioned under the respective loop.[2]
Classification of loops
Based on configuration
Horizontal loops(e.g. boot loop)
Vertical loops
Combination(T Loop)
Based on purpose of the loop
Leveling and Aligning
Retractione
Multipurpose
Based on presence of helix
Loops without helix(e.g. vertical loop)
Loops with helix(e.g. Helical bulbous loop)
Based on function
Opening loops
Closing loops
Biomechanical Properties of Loops
An ideal loop has a large range of action, large allowable working load and a low load deflection rate.[2] Parameters improving biomechanical properties are increasing height of the loop, additional wire at the apex of the loop and angulating loop base to apex which improves M/F ratio.[3] Off-centered placement of loop plays an important role in altering the moments generated at the alpha and the beta ends. Placement of loop towards anterior side would increase alpha moment and decrease beta moment. Differentials in M/F ratios can be very helpful in anchorage management. Thus, a higher beta moment leads to posterior anchorage augmentation. When inter-bracket distance is less, off-centering will affect the moment significantly, thus this distance is an important consideration for biomechanical properties of loop.[4]
Various Loops used in Contemporary Orthodontics
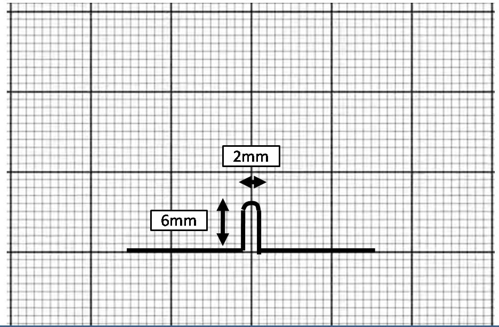
Vertical loop([Figure 1])
Vertical loop was in introduced by Robert Strang in 1933. It is constructed with 0.016” SS wire and has a height of 6mm. Vertical loops can be closing or opening loops and can be used for opening or closing spaces and rotating teeth.1Modifications of vertical loops are[5]
Double vertical loop used for labial/lingual movement and rotation correction
S loop- similar to vertical loop without undermining occlusal /gingival thrust
Omega loop which gives bodily thrust to the last tooth in the arch
Horizontal loop used for bite opening and easier bracket engagement
Double horizontal loop used for tipping and root movement
Horizontal T loop
Box loop, a combination of horizontal and vertical lever
Torquing loop produces labial or lingual torque
Burstone described the force system of vertical loop in retraction mechanics. Vertical height of 6mm is a typical clinical application as it delivers a force deflection rate of 437g/mm and moment to force ratio to 2.2mm. Moment to force ratio of 2.2mm is too low for uncontrolled tipping.
Moment to force ratio can be increased by increasing the height of the loop. Helix can be added to increase this height, however more than 3 helical turns were not useful. M/F ratio increases linearly as the helix is more apically placed thus further reducing force deflection rate.[6]
In Beggs mechanotherapy, anterior tooth alignment is accomplished with archwires incorporated with vertical loops. The loops increase the wire span between the teeth and produce a gentler pressure during movement. The looped arch is constructed with a round cuspid hook which rests on the mesial aspect of the cuspid bracket on either side. The loops are then activated to produce overcorrection of rotations, labio-lingual or mesio-distal movement.
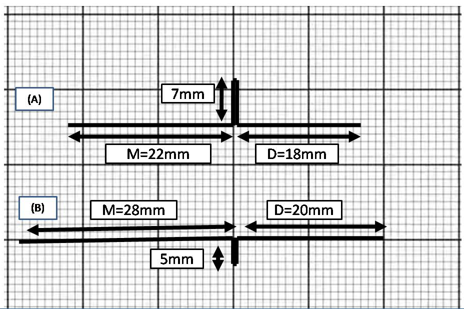
Bull loop([Figure 2])
The Bull loop was given by Harry L. Bull in 1951. A sectional steel arch wire made of 0.0215” x 0.025” was used to retract the anteriors. A closed loop in the region of the extraction site of the first bicuspid is activated to open the loop by a millimetre after tying the arches in. A tie-back loop is placed well ahead of the molar tube to activate the arch sufficiently. Dr. William Houghton modified the maxillary sectional arch by adding a small loop, distal to the closing loops for engaging the anterior end of the class II elastics.
An advantage of the use of this loop when used for class II correction in conjunction with class II elastics is that they do not procline the mandibular anteriors since the closing loops restrain this effect.[7]
Dimensions of the loop for each arch[8]
Upper bull loop – Height-7mm, wire distal to loop – 18mm, wire mesial to loop -22mm, Lower bull loop – Height-5mm, wire distal to loop – 20mm, wire mesial to loop -28mm
Horizontal loop / Boot loop ([Figure 3])
Boot loop was described by Morris M. Stoner in 1960 and is formed by placing the active legs parallel to the arch wire. Incorporating a horizontal loop allows greater control over the direction of the force.[5]
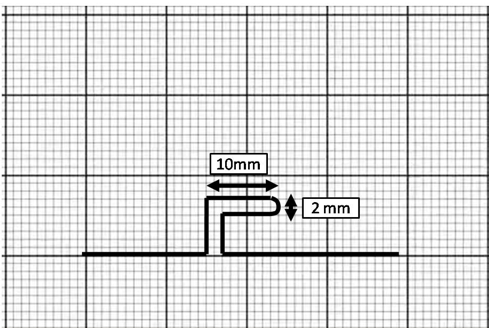
The horizontal loop’s principal value is its reduction of force in the vertical plane or occluso-gingival direction, permitting immediate bracket engagement in severely positioned teeth which the operator may want to elevate or depress. It is effective in bite opening. Immediate bracket engagement is possible without excessive force on severely crowded teeth. It is possible to contour the horizontal loop to press against the gingival area to develop a torquing activity on the root; however, clinically has not been found to be very effective. [5]
Efficiency of the double Horizontal Loop is best when kept on an individual tooth either above or below the line of occlusion. It can be activated in an occluso-gingival and labio-lingual plane but not in the mesiodistal plane. One loop can be contoured to elevate and the other loop can be contoured to depress, tending to tip the tooth or move the roots.[5]
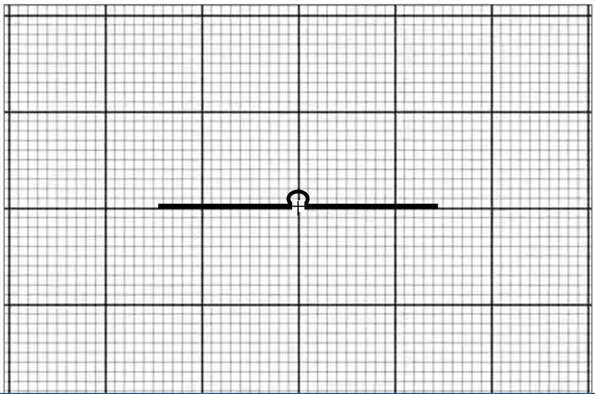
Omega loop ([Figure 4])
A variation of the open vertical loop was described by Morris M. Stoner in 1960. It was called so due to its resemblance to the Greek letter omega after which it is named. Its advantage over the open vertical loop lies in its lesser fracture tendency, owing to a more even stress distribution through the curvature of the loop rather than its concentration at the apex. It is commonly used for bodily movement of the root and as a molar stop. [5]
A modified omega loop was described to close a maxillary midline diastema by Gandhi et al. by placing two crimpable hooks on the arms of the loop diametrically opposite to each other. An E-chain stretched between the hooks provided the activating force to close the midline diastema.[9]
Loop ([Figure 5])
Loop was given by Dr Charles J Burstone 1962[10]
According to Burstone,[10], [11]
TMA wire should be used in construction of T loop.
Additional wire should be placed as far apically as possible to increase the activation moment-to-force ratio.
The loop centricity in the alpha and beta positions affects the rate of change of the moment-to-force ratio.

The large inter-attachment distance between the auxiliary tube on the first molar and the vertical tube of the canine allows sufficient room for the large activations required. In addition, it adds to the accuracy of determining the force system, since small errors in the shape or geometry of the spring will not radically change the forces produced.

Pre-activation bends placed in the loop has been shown in figure 6 and template for T-loop conformation was given by Hoenigl et al,[12] as shown in figure 7.[13]

The horizontal activation of the 'T' loop was studied by Koenig et al who found that a 'T' loop activated horizontally by 2 mm had a moment to force ratio which deviated from the reported experimental value by less than 2%.[14]
Vertical activation of the 'T', 'L', and rectangular loops studied by Vanderby et al.[15] showed a 'T' loop of 14 mm gingival-horizontal length and activated by 3 mm vertically had moments at the two ends of the loop which were found to be equal almost exactly to the experimental values. The vertical force was found to be higher than the mean experimental value, but within the two standard deviation range.

T loop in continuous arch have vertical segment of equal lengths as shown in figure 8.[16]
Asymmetric T loop ([Figure 9])
Asymmetric T loop was described by James Hilger in 1992.This loop allows simultaneous bite opening and space closure. It is made of 0.016” X 0.022” TMA or 0.019” X 0.025” TMA wire with 5mm vertical step, 2mm anterior loop, 5mm posterior loop and exaggerated reverse curve of Spee.[17]

Activation of asymmetric T loop is done by compressing short mesial loop and opening long distal loop.
Double keyhole loop(DKL loop) ([Figure 10])
John Parker of Almeda, California introduced Double keyhole loop (DKL) in Roth treatment mechanics. 0.019” X 0.025” rectangular SS archwireis used for fabrication of DKL. This loop resembles a champagne bottle which is a mixed vertical and horizontal loop.
DKL consists of two symmetrical loops bilaterally near canines that resemble key eyelets. Height of the loop is 7mm and the distance between two loops of the same side is approximately 8 mm.
Indispensable requisites for installation of DKL:
The anterior sector should be diastema free and consolidated with ligature wire to maintain close proximal contact.
Well aligned dental arches with previous arch wire sequence fully expressing torque on each tooth.
Dimension of DKL must be similar to previous rectangular arch wire to allow an easy insertion and perfect sliding of the arch in the slots of the braces.[18], [19], [20]
Activation of DKL:
Use of the arch as a spring
Activation by distal traction of the arch
Activation with retro-ligature
Used as an anchorage for auxiliary elements
In posterior sector migration (anchorage loss) type of special cases DKL arch was used as an anchorage for auxiliary elements.
Modification of DKL arch has been used for retraction without torque.[18]

Rickett’s Canine retraction spring ([Figure 11])
Rickett’s canine retraction spring was described by Robert Rickett in 1976.[21] The maxillary canine retractor is a double vertical helical T closing loop with extended crossed arms. It is usually fabricated from 0.016”x0.022” SS wire of 70 mm length. It produces a canine retraction force of 50 gm for an activation of about a millimetre. An activation of 3-4 mm is required for individual canine retraction.[21], [22]
In the mandible, the design of the spring is more compact. It is made of 0.016 x 0.016” blue Elgiloy and produces a force of 75 gm for a millimetre of activation. 2-3 mm of activation is required for producing the necessary force.[21], [22]

Opus loop ([Figure 12])
Opus loop was given by Raymond E. Siatkowski in 1977 in study which was a systematic approach to closing loop design for use in continuous arch wires. The design process uses Castigliano's theorem to derive equations for moment-to-forceratio (M/F) in terms of loop geometry. [2]
Opus loop is capable of delivering M/F within the range of 8.0-9.1 mm.
Dimensions: 10 mm height, 10 mm length and 0.5 mm radius.It is constructed with 0.016 × 0.022 inch SS wire, 0.018 × 0.025 inch SS wire or 0.017 × 0.025 inch TMA wire. [23]
Variations of Opus loops are Opus 90 and Opus 70.

PG retraction spring ([Figure 13])
PG retraction spring was introduced in 1985 by PoulGjessing. The resultant spring design, made from 0.016 x 0.022 inch stainless steel wire and finalized by using a trial-and-error procedure applied to the bench testing set-up. The predominant active element is the ovoid doublehelix loop extending 10 mm apically. The spring is constructed to resist rotational and tipping tendencies during retraction and not to correct rotations and/or extreme deviations in inclination of the canine. Therefore, leveling of the buccal segments must be terminated prior to insertion of the spring.Activation to 140 to 160 grams is obtained by pulling distal to the molar tube until the two sections of thedouble helix are separated 1 mm and is repeated every 4 weeks. Minor rotations of the canine, which may take place during retraction in case of anatomic deviations in root anatomy, are easily corrected with lingual elastics subsequent to retraction. [24]
Halazonetis in his study placed pre-activation bends of 15° and 12° on the anterior and posterior legs, respectively. This was followed by activation of loop by 1, 2 and 3 mm. A load deflection of 64 gram force/mm of activation was calculated, which is higher than the 45 gram force/mm reported experimentally. The moment-to-force ratio is high for anterior segment which was ranging from 7 mm to 10.5 mm at 3 mm and 1 mm activation respectively. These values are not as high as those reported by Gjessing. [11]

Loop ([Figure 14])
In 1995 Dr. Varun Kalra introduced “K-Loop” appliance for molar distalization in Class II malocclusion, which he claimed to have been developed in accordance to certain biomechanical principles as out lined by Dr. Charles Burstone and has the ability to move the maxillary molars distally with total bodily control which is of great clinical significance The appliance consists of a K-loop to provide the forces and moments and a Nance button for anchorage. It is made of 0.017”x 0.025”TMA wire with each loop 8mm long and 1.5mm wide. Wire is marked mesial to the molar tube distal of premolar bracket, bend is placed 1 mm distal to distal mark and 1 mm mesial to mesial mark. Stop should be well-defined and about 1.5mm long. It is placed with 2mm activation.[25]

K-SIR arch
The K-SIR arch which stands for Kalra – Simultaneous Intrusion and Retraction was developed by Dr. Varun Kalra. It is a modification of the segmental arch technique as applied to continuous arches. Closed U-loops of 7mm height and 2mm width is fabricated with 0.019”x 0.025” TMA archwire at the sites of extraction. A 90 degree centred V-bend is placed at the level of each U-loop and a 60 degree V-bend located off centred with the shorter arm near the molar tube producing an increased clockwise moment on the 1st molar thereby augmenting posterior anchorage. A 20 degree anti-rotation bend is used to counter the mesio-lingual rotation of the buccal segments.[26]
Trial activation reduces the stress build up in the loop and also decreases the severity of the V-bends. It exerts an extrusive moment on the molar which needs to be adequately controlled. This is overcome by the forces of occlusion and mastication. Activation bends are shown in figure 16.[26]
Its advantages include simplicity in design and fabrication, comfort to the patient and less chances of tissue impingement. As it carries out en-masse retraction it abbreviates orthodontic treatment time compared to conventional edgewise mechanics. Also, this prevents the appearance of an unsightly space distal to the laterals which is seen in individual canine retraction.[26]

Rectangular loop ([Figure 16])

The rectangular loop described by Drs. Vittorio Cassiafesta and BirteMelsen is a versatile loop which can be used for first, second and third order corrections. Being inserted and held at both ends, it encompasses the statically indeterminate force system. TMA wire is the wire of choice in fabricating a R-loop since wires of varying dimensions can be welded together. Typically, 0.018”/ 0.017” x 0.025” wires are used for the correction of rotated and tipped teeth since they have a large working range. This loop is the most effective in correcting single tooth discrepancies in all planes of space. A good control of the desirable tooth movement along with transference of the undesirable effects to the anchorage unit is noted. A particular advantage of this loop is that round ripping can be minimized with a force system with better accuracy and efficiency. [27]
Mushroom loop ([Figure 17])
Pre-fabricated mushroom loop arch-wires were introduced by Drs. Flavio Uribe and Ravindra Nanda in 2003. This looped arch-wire produces an ideal moment to force ratio for translation. Moreover, neither is there any interference of the loop with the gingival tissue nor does it distort readily thereby improving the delivery of orthodontic load. 0.017” x 0.025” β-III Connecticut new arch-wire is used at distances which have been standardized between 26-46 mm with a 2 mm increment. This measurement in millimetre denotes the distances between the distal surfaces of the lateral incisors. [28]
Pre-activation of 3mm separation between the legs is done anteriorly along with anchorage reinforcement as necessary. Reactivation of the loop is not done until a closure of 3mm of space closure thus ensuring a constant moment to force ratio is maintained. The same wire is left in place for an additional two visits to ensure correction of axial root inclination by utilizing the residual moments. [28]

Snail loop ([Figure 18])
Snail loop was introduced by Dr. Pavankumar Vibhute in 2004. Snail loop is spiral shaped and designed for en masse space closure of the anterior teeth. [29]
The snail loop is fashioned from 0.017"x0.025" stainless steel wire by bending a simple omega loop into a spiral shape, which provides the forces and moments. The outer portion of the snail loop is 8mm high and 6mm wide and the inner portion is 6mm high and 3mm wide. [29]

Double delta loop ([Figure 19])

The double delta loop serves to close spaces. It is also frequently used for the leveling and integration of the arches. [21]
Tear drop loop([Figure 20])
The ideal force applied to achieve movement of the mandibular incisors is approximately 2.60 N. [11], [30], [31]
The springs that best approached this value were the teardrop springs of 6 mm height activated by 0.5 mm, which provided 2.51 N force and the teardrop loop of 8 mm height which was activated 1.0 mm provided a 2.77 N force. The teardrop loops with heights of 7 had values less than 2.60 N, heights of 8 mm had values less than 1.89 and when activated 0.5 mm had values 1.37 N. The teardrop loops with heights of 7 and 8 mm activated 1.0, 1.5, and 2.0 mm had higher forces than the ideal values for mandibular incisor movement.

Bulbous helical loop([Figure 21] )

A helical bulbous loop of height 7.5mm is fabricated at the end of mandibular anchorage preparation of 0.020” x 0.025” arch wire flush against the 2order bends. The helix is wound to the lingual during fabrication. The helical loops are opened by 1mm prior to their insertion which distalizes the 2about molar disalization.
Shoe horn loop ([Figure 22])
Shoe horn loop has been described in Tweed Merrifield appliance. The height of the loop is 8mm. It consists of a long and a short vertical loop.[32]

Cherry Loop([Figure 23])

Cherry loop was given by Peretta Redento in 2002. It is constructed with 0.017”x 0.025” SS. A large diameter round loop of 8mm width is bent using Rouland plier. Height of the loop is 8-9mm and opens 3-4mm at occlusal end to avoid stress and deformation. Cherry loop is used in molar protraction where it is placed one half distance. The loop is activated in 2 phases, 1.[33]
Studies on loops have been described in Table 1.
|
Articles |
Study design |
Aim |
Sample |
Type of appl |
Type of mech |
Result |
|
Geramy et al International Orthodontics 2018[34] |
Experimental method using a “Santam” universal testing machine and finite element method |
To compare the results of FEM and experimental methods in determining moment, force and M/F of four loops and to find the level of concordance between them. |
Open vertical loop, closed vertical loop with helix, T loop and L loop |
Retraction |
The force and moment values increase when the activation range and angular bend increase, and M/F increases when the activation range decreases and angular bend increases. Experimental results and FEM predictions were concordant while determining the mechanical characteristics of the loops |
|
|
Geramy A. Angle Orthod. 2002.[35] |
Finite element method |
To optimize the loop modification stepby step in unilateral overjet |
Helical, vertical, closed u loop 2 loop 1 loop 1 loop + helix 2 loop + activation |
Retraction in unilateral overjet case |
Best result by placing vertical, helical and closed on unilateral overjet and vertical loop in normal side |
|
|
Krishnan et al Angle Orthod 2012[36] |
Electron scanning microscopy |
Evaluation of physical vapour deposition coated archwire |
Beta Ti uncoated U loop Vs Beta Ti with Titanium aluminium nitride (TiAlN) coated helical loop Vs Beta Ti with tungsten carbibe/Carbon(WC/C) coated reverse U loop |
Beta Ti with tungsten carbibe/Carbon(WC/C) wires can be recommended due to low frictional properties and low load deflection rate |
||
|
Kamisetty J Clin Diagn Res. 2014[37] |
Finite Element Method |
Determine moment, M/F ratio |
Tear drop(19x25ss) Vs t-loop (19x25ss) vs vertical loop (19x25ss) |
Retraction |
Tear drop loop preferred over the other two retraction loop |
|
|
Odegard et al Am J Orthod and Dentofac Orthop. 1996[38] |
Torsional forces measured in a custom made device. |
To evaluate the torsional flexibility and stiffness of the wires with different loop designs and cross-sections. |
Half helical contraction loop, bull loop, T-loop, keyhole loop and tear drop loop |
A custom-made used in the study mounted a stationary bracket on a pedestal, through which the wire to be twisted passes and the various parameters were evaluated. |
Torsional flexibility increased from 26% to 63% depending on loop design. Reverse closing loop caused greatest increased in flexibility whereas bull loop changed the torsional stiffness the least. T-loop is the loop of choice When vertical flexibility is needed along with reduced torsional stiffness. |
|
|
Haris et al J Contemp Dent Pract. 2018[39] |
Finite element model |
To evaluate the force, moments and M/F ratio in 4 loops with different pre-activation bends at 1,2, 4 mm activation. |
T-loop, K-SIR, omega loop, Tear drop loop |
Retraction |
Without pre-activation bends, highest force values found in omega, least in T-loop. With pre-activation bends highest force seen in tear drop loop, least in T-loop. M/F ratio in the α-segment similar in all loops. T loop with preactivation bend showed the most favourable properties. |
|
|
Techalertpaisarn et al Am J Orthod Dentofacial Orthop. 2013[40] |
Finite Element Method |
Investigation of mechanical properties |
OPUS (opus 90, opus 70) Vs L loop (L90, L70, LC90, LC70) Vs T loop |
M/F ratio LC90-highest M/F ratio L90>l70 Opus90>opus70 LC90>LC70 |
||
|
Rao et al Journal of Indian Orthodontic Society 2013[41] |
Finite Element Method |
Determine MF ratio, FΔ rate and force |
3snail (o,10
2snail (o,10 3snail (o,10
3snail (o,10 OPUS LOOP 17X25TMA TEAR DROP LOOP 17X25TMA |
17x25 TMA and 19x25 TMA with 20 activation snail loop delivers M/F ratio for bodily movt and acceptable FΔ rate |
||
|
Saf avi et al Aust Orthod J. 2006[42]
|
Finite Element Method |
Force, moment, M/F ratio with/without preactivation bends |
T loop (16x25 ss) Vs L loop (16x25 ss) Vs Vert helical loop (16x25 ss) |
Preactivation bend increases MF ratio at 1mm Dramatic decrease in M/F ratio at 0.1mm deactivation |
||
|
Kumar et al Angle Orthod 2008[43] |
Invitro study |
Compare the magnitude and direction of initial canine displacement |
Closed coil spring Vs Open coil spring Vs PG spring Vs T loop |
Holographic interferometry |
T loop preferred in retraction with minimal tipping PG spring preferred when higher force magnitude is desired. |
|
|
Lim et al Angle Orthod 2008[44] |
Invitro study |
Effect of temperature on Force, moment, M/F ratio |
18x25 Jap niti T-loop Vs 17x25 TMA T loop Heated to 510°C for 9minutes |
Loop testing Apparatus with force transducer |
Temperature has significant effect on force and moment of Niti loopwhereas M/F ratio remained constant Temperature has minimal influence on TMA T loop |
|
|
Chackoet al Prog Orthod. 2018[45] |
Finite Element Method |
Force, moment, M/F ratio at 1mm activation in lingual ortho |
Closed helical Vs T loop |
Retraction |
Closed helical loop with activation has increased force and moment . T-loop with activation has more moment to force ratio. |
|
|
Keng et al Eur J Orthod 2012[46] |
Pros RCT (Split mouth design) |
Rate of space closure and tooth angulations |
12 - 6M, 6F (13-20 yrs) |
Preactivated Niti T Loop Vs Preactivated TMA T Loop |
Canine retraction |
No significant difference between them Niti loop has greater ability of retain and return |
|
de Castro et al Korean J Orthod. 2015[47] |
Effect of T loop preactivation on M/F, Force and Load deflection rate |
100 T loops Grp 1 – 50 SS T loop Grp 2 – 50 TMA T loop |
0°,20°,40° occlusal distribution T loop preactivation Vs 20° gingival distribution T loop preactivation Vs 40° occluso-gingival distribution T loop preactivation |
Orthomeasure apparatus |
M/F ratio decrease on activating preactivated loop Whereas increase on activating loops without preactivation Highest M/F ratio when bend placed gingivally |
|
|
Jiang et al Angle Orthod 2020[48] |
Finite Element Method |
To assess the mechanical environment during lower retraction |
T loop Vs Pwerarm to canine bracket (enmasse) Vs Powerarm to archwire (enmasse) |
Retraction in lower segment |
T loop is more predictable Powerarm produce rotational and archwire distortion |
|
|
Shashidhar et al J Clin Diagn Res. 2016[49] |
Pros comp study (Lateral ceph) |
Compare the skeletal and dentoalveolar effect |
Grp 1 -9F, 6M (16±2.6 yrs) Grp 2 7F, 8M (15.4±4.7) |
K loop (17x25 TMA) Vs pendulum |
Distalization |
K-Loop molar distalizing appliance has similar skeletal and dentoalveolar effects as that of pendulum appliance, with the advantages of simple yet efficient to control the moment-force ratio to produce all types of tooth movements and also requires minimal patient co-operation |
|
Polat-Ozsoy et al Angle Orthod 2008[50] |
Pros comp study (Lateral ceph) |
Soft tissue change associated with 2 different distalisation method |
Grp 1 – 7F, 8M (15±3.4 yrs) Grp 2- 10F, 5M (14.2±2.9) |
K LOOP + Pendulum Vs Cervical pull headgear |
Distalisation |
K LOOP + Pendulum has no significant skeletal or soft tissue change when compared to cervical pull headgear |
|
Acar et al Eur J Orthod 2010[51] |
Pros comp study (Lateral ceph) |
Dentoalveolar change associated with 2 different distalisation method |
Grp 1 – 7F, 8M (15±3.4 yrs) Grp 2- 10F, 5M (14.2±2.9) |
K LOOP + Pendulum Vs Cervical pull headgear |
Distalisation |
The major advantages of the pendulum appliance K-loop combination were prevention of anchorage loss on the anterior teeth and significantly less distal tipping at the maxillary molars. However, the amount of distal tipping of the molar teeth was still greater than with CHG. |
|
Ferreira et al Dental Press J Orthod. 2020[52] |
Finite element analysis |
Numerical simulation of Von Mises stresses on mushroom arch wires |
Mushroom loop |
A maximum tension of 1158 MPa was noted in the whole loop at 5 mm activation except a small area near the top of the loop where a maximum tension of 1324 MPa was recorded. Mushroom loops produce tension levels in an elastic range and an activation of up to 5mm is safe. |
||
|
Rodrigues COBEM 2015.[53] |
Finite element models |
To analyze the influence of orthodontic delta springs with and without upper helix on tipping, translation. |
Delta spring 0.016 x 0.022 inches TiMo alloy wire was used. Delta springs with helix were activated up to 12.0 mm and springs without helix up to 8.0 mm. |
Retraction |
Springs with helix provide lower forces than those found in springs without helix. No tooth movement in the occlusal plane was found for the M/F ratios studied. Delta springs without helix showed higher reaction forces than those with helix. |
|
|
Jadhav et al JIOS 2019[54] |
Finite element models |
To evaluate and compare the force and LDR generated by different unit displacement through 1- 4mm of springs that vary in design and wire material. |
Double delta closing loop, double vertical T crossed closing loop, double vertical helical closing loop, Ricketts Maxillary retractor |
Force and LDR increased with incremental loops of β-titanium and those of 0.017” x 0.025” had lesser force and LDR than those of SS and 0.019” x 0.025” dimension. Double delta showed highest force values amongst the loops studied. |
Conclusion
Six goals to be considered for any universal method of space closure include:
Differential space closure: The capability of anterior retraction, posterior protraction or a combination of both should be possible.
Minimum patient cooperation: This is achieved by eliminating the usage of head gears and elastics.
Axial inclination control
Control of rotations and arch width
Optimum biologic response Tissue damage, particularly root resorption, should also be at a minimum
Operative convenience: The mechanism should be relatively simple to use, requiring only a few adjustments for the complication of space closure. [10]
Source of Funding
None.
Conflict of Interest
None.
References
- CJ Burstone, K Choy. . The biomechanical foundation of clinical orthodontics 2015. [Google Scholar]
- VP Jayade, CV Jayade. . Essentials of orthodontic biomechanics-basic and applied 2011. [Google Scholar]
- CJ Burrstone, HA Koenig. Optimizing anterior and posterior retraction. Am J Orthod 1976. [Google Scholar]
- AJ Kuhlberg, CJ Burstone. T-loop position and anchorage control. Am J Orthod 1997. [Google Scholar]
- RHW Strang. . A Text-Rook of Orthodontia 1943. [Google Scholar]
- MM Stoner. Force control in clinical practice: I. An analysis of forces currently used in orthodontic practice and a description of new methods of contouring loops to obtain effective control in all three planes of space. Am J Orthod Dentofac Orthop 1960. [Google Scholar]
- HL Bull. Obtaining facial balance in the treatment of Class II, division 1. Angle Orthod 1951. [Google Scholar]
- A Choudhary, SM Bapat, S Gupta. Space Closure Using Frictionless Mechanics. Asian J Dent Res 2016. [Google Scholar]
- M Gandhi, R Hattarki, KM Keluskar. Closure of a maxillary midline diastema using a modified omega loop. J Indian Orthod Soc 2015. [Google Scholar]
- CJ Burstone. The segmented arch approach to space closure. Am J Orthod 1982. [Google Scholar]
- DJ Halazonetis. Design and test orthodontic loops using your computer. Am J Orthod Dentofacial Orthop 1997. [Google Scholar]
- KD Hoenigl, J Freudenthaler, MR Marcotte, HP Bantleon. The centered T-loop-A new way of preactivation. Am J Orthod Dentofac Orthop 1995. [Google Scholar]
- AF Viecilli, MPM Freitas. The T-loop in details. Dental Press J Orthod 2018. [Google Scholar]
- H A Koenig, R Vanderby, D J Solonche, C J Burstone. Force systems from orthodontic appliances: an analytical and experimental comparison. J Biomech Eng 1980. [Google Scholar]
- R Vanderby, CJ Burstone, DJ Solonche, JA Ratches. Experimentally determined force systems from vertically activated orthodontic loops. Angle Orthod 1977. [Google Scholar]
- SG Caldas, AA Ribeiro, H Simplício, AW Machado. Segmented arch or continuous arch technique? A rational approach. Dental Press J Orthod 2014. [Google Scholar]
- JJ Hilger, P Farzin-Nia. Adjuncts to bioprogressive therapy- The asymmetrical T archwire. J Clin Orthod 1992. [Google Scholar]
- E Pablo. The retrusion handle in helical closed "L". Clin Orthod 2002. [Google Scholar]
- G Jorge, T Elisa, E Horacio. . The treatment orthodontic with straight arch 2003. [Google Scholar]
- B Alfredo, B Regina, G Carlota, M Nayre, L Diego. Comparative study between simple arcs and double wrench in steel and TMA And distribution of loads on the dental elements. Clin Orthod 2005. [Google Scholar]
- RM Ricketts. Bioprogressive therapy as an answer to orthodontic needs. Part II. Am J Orthod 1976. [Google Scholar]
- CH Chakravarthy, PK Kumar. ‘Loops in Orthodontics. A Review. Indian J Mednodent All Sci 2014. [Google Scholar]
- R E Siatkowski. Continuous arch wire closing loop design, optimization, and verification. Part II. Am J Orthod Dentofacial Orthop 1997. [Google Scholar]
- R Gjessing. Biomechanical design and clinical evaluation of a new canine-retraction spring. Am J Orthod 1985. [Google Scholar]
- V Kalra. The K-loop molar distalizing appliance. J Clin Orthod 1995. [Google Scholar]
- V Kalra. Simultaneous intrusion and retraction of the anterior teeth. J Clin Orthod 1998. [Google Scholar]
- N Nandini. Versatility of rectangular loop in three dimensional control of single tooth discrepancies. J PEARLDENT 2011. [Google Scholar]
- F Uribe, R Nanda. Treatment of Class II, Division 2 malocclusion in adults: biomechanical considerations. J Clin Orthod 2003. [Google Scholar]
- PJ Vibhute, S Srivastava, PV Hazarey. The snail loop for low-friction space closure. J Clin Orthod 2008. [Google Scholar]
- DJ Halazonetis. Understanding orthodontic loop preactivation. Am J Orthod Dentofac Orthop 1998. [Google Scholar]
- A Hart, L Taft, AL Greenberg. The effectiveness of differential moments in establishing and maintaining anchorage. Am J Orthod Dentofac Orthop 1992. [Google Scholar]
- SA Cardiel Ríos. Correction of a severe Class II malocclusion in a patient with Noonan syndrome. Am J Orthod Dentofac Orthop 2016. [Google Scholar]
- R Peretta, M Segù. Cherry loop: a new loop to move the mandibular molar mesially. Prog Orthod 2001. [Google Scholar]
- FR Rodrigues, PC Borges, MA Luersen, MA Ferreira. Tooth movement tendency induced by orthodontic delta springs with and without helix: a finite element study. Proceedings of the 23st International Congress of Mechanical Engineering-COBEM 2015. [Google Scholar]
- A Geramy, R Mahmoudi, A R Geranmayeh, ES Borujeni, H Farhadifard, H Darvishpour. A comparison of mechanical characteristics of four common orthodontic loops in different ranges of activation and angular bends: The concordance between experiment and finite element analysis. Int Orthod 2018. [Google Scholar]
- A Geramy. Optimization of unilateral overjet management: three-dimensional analysis by the finite element method. Angle Orthod 2002. [Google Scholar]
- V Krishnan, KK Ravikumar, K Sukumaran, KJ Kumar. In vitro evaluation of physical vapor deposition coated beta titanium orthodontic archwires. Angle Orthod 2012. [Google Scholar]
- SK Kamisetty, N Raghuveer, N Chakrapani, Dwaragesh, Praven. Evaluation of Effects and Effectiveness of Various α and β Angulations for Three Different Loop Made of Stainless Steel Arch Wires - A FEM Study. J Clin Diagn Res 2014. [Google Scholar]
- J Ødegaard, T Meling, E Meling. The effects of loops on the torsional stiffnesses of rectangular wires: an in vitro study. Am J Orthod Dentofac Orthop 1996. [Google Scholar]
- TPM Haris, PG Francis, VA Margaret, G Roshan, V Menon, V Jojee. Evaluation of Biomechanical Properties of Four Loops at Different Activation: A Finite Element Method Study. J Contemp Dent Pract 2018. [Google Scholar]
- BS Jadhav, RV Krishnan, VJ Patni, GR Karandikar, AG Karandikar, SD Pardeshi. Comparative Evaluation of the Force and Load Deflection Rate for Different Loop Springs with Varying Designs, Wire Dimensions, and Materials: A Finite Element Method Study. J Indian Orthod Soc 2019. [Google Scholar]
- PR Rao, SS Shrivastav, RA Joshi. Evaluation and Comparison of Biomechanical Properties of Snail Loop with that of Opus Loop and Teardrop Loop for en masse Retraction of Anterior Teeth: FEM Study. J Indian Orthod Soc 2013. [Google Scholar]
- MR Safavi, A Geramy, AK Khezri. M/F ratios of four different closing loops: 3D analysis using the finite element method (FEM). Aust Orthod J 2006. [Google Scholar]
- YM Kumar, NS Ravindran, MR Balasubramaniam. Holographic analysis of the initial canine displacement produced by four different retraction springs. Angle Orthod 2009. [Google Scholar]
- Y Lim, A Quick, M Swain, P Herbison. Temperature effects on the forces, moments and moment to force ratio of nickel-titanium and TMA symmetrical T-loops. Angle Orthod 2008. [Google Scholar]
- A Chacko, T Tikku, R Khanna, RP Maurya, K Srivastava. Comparative assessment of the efficacy of closed helical loop and T-loop for space closure in lingual orthodontics-a finite element study. Prog Orthod 2018. [Google Scholar]
- FY Keng, AN Quick, MV Swain, P Herbison. A comparison of space closure rates between preactivated nickel-titanium and titanium-molybdenum alloy T-loops: a randomized controlled clinical trial. Eur J Orthod 2012. [Google Scholar]
- SM De Castro, R Moreira, AC Braga, AP Ferreira, MC Pollmann. Effect of activation and preactivation on the mechanical behavior and neutral position of stainless steel and beta-titanium T-loops. Korean J Orthod 2015. [Google Scholar]
- F Jiang, WE Roberts, Y Liu, A Shafiee, J Chen. Mechanical environment for lower canine T-loop retraction compared to en-masse space closure with a power-arm attached to either the canine bracket or the archwire. Angle Orthod 2020. [Google Scholar]
- NR Shashidhar, SR Reddy, MR Rachala. Comparison of K-loop Molar Distalization with that of Pendulum Appliance - A Prospective Comparative Study. J Clin Diagn Res 2016. [Google Scholar]
- O Polat-Ozsoy, A Gokcelik, A Güngör-Acar, BH Kircelli. Soft tissue profile after distal molar movement with a pendulum K-loop appliance versus cervical headgear. Angle Orthod 2008. [Google Scholar]
- A G Acar, S Gürsoy, M Dinçer. Molar distalization with a pendulum appliance K-loop combination. Eur J Orthod 2010. [Google Scholar]
- F Mda, FRM Rodrigues, MA Luersen, PC Borges, R Nanda, A Mrd. Von Mises stresses on Mushroom-loop archwires for incisor retraction: a numerical study. Dent Press J Orthod 2020. [Google Scholar]
- P Techalertpaisarn, A Versluis. Mechanical properties of Opus closing loops, L-loops, and T-loops investigated with finite element analysis. Am J Orthod Dentofacial Orthop 2013. [Google Scholar]
- Introduction
- Materials and Methods
- Biomechanical Properties of Loops
- Various Loops used in Contemporary Orthodontics
- Vertical loop([Figure 1])
- Bull loop([Figure 2])
- Dimensions of the loop for each arch[8]
- Horizontal loop / Boot loop ([Figure 3])
- Omega loop ([Figure 4])
- Loop ([Figure 5])
- Asymmetric T loop ([Figure 9])
- Double keyhole loop(DKL loop) ([Figure 10])
- Rickett’s Canine retraction spring ([Figure 11])
- Opus loop ([Figure 12])
- PG retraction spring ([Figure 13])
- Loop ([Figure 14])
- K-SIR arch
- Rectangular loop ([Figure 16])
- Mushroom loop ([Figure 17])
- Snail loop ([Figure 18])
- Double delta loop ([Figure 19])
- Tear drop loop([Figure 20])
- Bulbous helical loop([Figure 21] )
- Shoe horn loop ([Figure 22])
- Cherry Loop([Figure 23])
- Conclusion
- Source of Funding
- Conflict of Interest